音響タグを魚に取り付けて位置を追跡——Raspberry Pi制御の自律型無人船「Fish Otter」
2022/03/04 07:30

Raspberry Pi公式ブログが、Raspberry Piで制御するロボットボートを採用した魚の位置追跡プロジェクト「Fish Otter」を紹介した。
ノルウェー科学技術大学(NTNU)が進めているこのプロジェクトでは、水面下での魚の行動追跡に自律型双胴船「Fish Otter」を使用しており、Fish Otterの制御用にRaspberry Pi 4が使用されている。
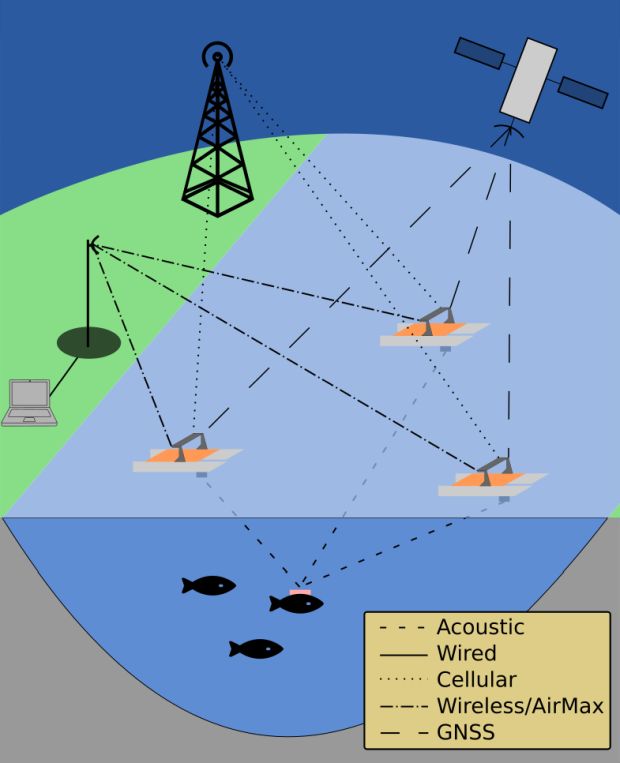
このプロジェクトの目的は、複数のFish Otterがセンサーで読み取った情報を組み合わせて、水面下の魚の位置を持続的に追跡することだ。
魚の位置追跡には、音波を発信する小型の音響タグを使用。魚にはタグを直接埋め込む、「えさ」として食べさせる、もしくは魚にタグを注射するといった方法で取り付ける。大型の魚には外側にタグを直接付着させる。こうしてタグ付けした魚の位置を、タグ識別によりその位置を推定し追跡する仕組みだ。
タグからの信号が受信機に到達するまでの時間は、信号の移動距離によって異なる。このため、各船舶までの信号到達時刻の差異からタグと各受信機までの距離の違いを計算し、魚の位置を推定する。
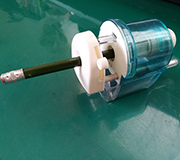
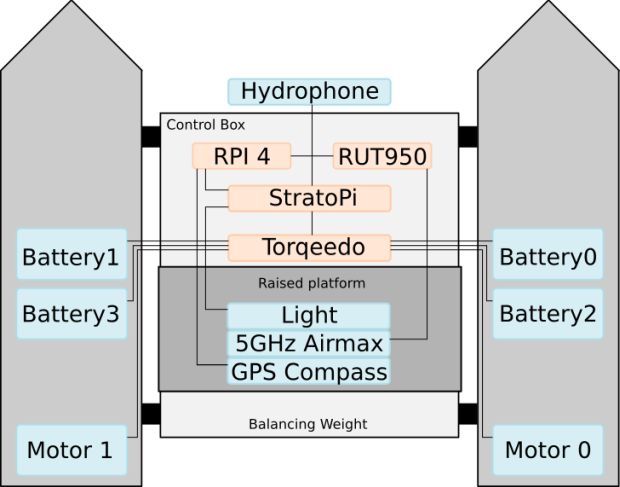
Fish Otterは小型の無人双胴船で、推進機関として固定式電動スラスター2基を採用している。1隻の大きさは2000×1080×815mm、重量は55kgだ。
Fish Otterの船体やスラスター、電力分配系統などはノルウェーのMaritime Robotics製データ収集用無人水上艇「Otter」をベースに設計しており、NTNUが設計した新型センサーや制御システムも搭載している。
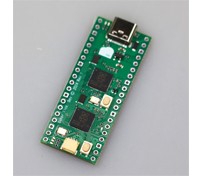
Fish Otterは制御用OSとしてRaspberry Pi OS Liteを採用し、カスタマイズした制御用組み込みソフトウェア「DUNE Unified Navigation Environment」を搭載している。Raspberry Pi OSを選んだ理由は、これまでの実績とコミュニティーによるサポートが充実しているからだという。