人機一体が人型ロボットの下半身制御技術のデモを実施
2024/10/04 11:45
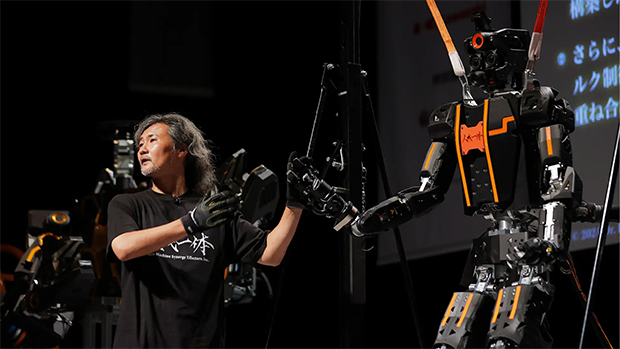
人機一体は、2024年8月1日開催の「人機一体 成果発表会 2024」において人型重機の下半身制御のコア技術「ハイブリッド・オートバランス制御(HABC)」を実装したロボット「零一式カレイド ver.1.1」のバランス制御デモンストレーションを実施した。
同社はかねてより人型重機の上半身部分にあたるロボットの研究開発を進めており、2020年からはJR西日本、日本信号と鉄道設備メンテナンスにおける高所重作業の解消に向けたPoC試作機「零式人機」シリーズの共同研究開発に取り組んできた。
実用化のベースとなるPoC試作機「零式人機 ver.2.0」で使用している人機一体の特許技術などのライセンスに基づき、日本信号より「多機能鉄道重機」が製品化され、2024年7月にJR西日本の和歌山線で初めて実作業に使用された。今後はさまざまな営業線で、高所での鉄道メンテナンス作業に使用される予定だ。
また、ロボットの上半身部分だけでなく、下半身部分についても制御システムなどの研究開発を進めてきた。2023年11月からは川崎重工業が開発したヒューマノイドロボット「Kaleido」に人機一体の制御技術を実装する研究開発を進め、2024年8月1日にHABCを実装した零一式カレイド ver.1.1として、バランス制御デモンストレーションを実施した。
HABCとは、歩行計画のような上位の制御を人間の操作に、バランス維持のような下位の制御をコンピューターに任せて、力制御ベースで統合することで、人間の判断能力とコンピューターの制御能力を両立する技術だ。