自律+軌道走行のハイブリッド自動搬送ロボットで、物流現場の問題解決に挑むLexxPluss
近年のECの市場拡大に加え、コロナ禍での需要増から、「物流」が改めて人々の生活を支える重要な社会インフラとして認知されてきた。しかしその半面、人口減少や少子高齢化を背景に、物流業界の人手不足感は年々強まっている。そうした物流現場の問題を自動搬送ロボットで解決すべく2020年3月に創業したスタートアップ、LexxPluss(レックスプラス)の代表取締役CEO阿蘓将也(あそ まさや)氏に、起業の経緯とプロダクト開発の背景、今後の展望について聞いた。(撮影:加藤甫)
人と協調して働く自動搬送ロボット
倉庫と聞くと、アマゾンを始め自動化がダイナミックに進んでいる業界のように思えるかもしれない。しかし、現状、殆どの物流倉庫では、品物を載せたパレットを運ぶフォークリフトや、ピッキングする作業員が庫内で行き交う非常にアナログな現場である。
LexxPlussが開発しているのは、そんな物流倉庫で使われる自動搬送ロボット(AMR:Autonomous Mobile Robot)だ。倉庫における自動搬送ロボットは、「無人の環境で動くロボット」と「人がいる環境で、人と協調して動くロボット」の2種類に大別できる。
Amazonが2012年に買収したKiva Systemsの技術をベースにした自動搬送ロボットは、現在グローバルで導入が進んでいるが、これは無人の環境で動かす類いのロボットだ。作業員は定位置にいて動き回ることはなく、代わりにロボットが倉庫内を縦横無尽に動き回り、棚や台車を人のいるところに運んでくる。全体を俯瞰して複数のロボットを最も効率的に動かす完全自動化システムは、ロジックを組んでその通りにロボットを動かすことができればよく、「人とぶつからないように」といった安全性を考慮しなくてよい分、比較的容易に実現可能だ。
ただ実際のところ、物流業界を見渡してみれば完全に無人の倉庫はないといっていいし、それを目指してすらいない物流企業がほとんどだ。
 阿蘓将也氏。2020年3月末に創業したLexxPluss代表取締役CEO。かわさき新産業創造センター(KBIC)の1室がオフィス。部屋を飛び出し、廊下を使って走行テストを行うことも。
阿蘓将也氏。2020年3月末に創業したLexxPluss代表取締役CEO。かわさき新産業創造センター(KBIC)の1室がオフィス。部屋を飛び出し、廊下を使って走行テストを行うことも。
「自動搬送ロボットの開発はさまざまな企業が取り組んでいますが、人が活動する領域で、正確に、安全に、効率よく動けるロボットがあるかというと、ある動きはできるが、別の動きはできないといった具合で、十分なものはありませんでした。加えて、動きが限定的なロボットですら導入できていない倉庫が大半です。倉庫の約80%は、そもそも自動化ソリューション導入に向けた試験すらできていないというデータもあります。僕らはそこに可能性を見いだしました」と阿蘓氏は話す。
自律走行と軌道走行をかけ合わせた「ハイブリッド型」の強み
LexxPlussの自動搬送ロボットは、「自律走行モード」と「軌道走行モード」という2つのモードを備え、場面に応じて切り替えられる「ハイドブリッド型」であることが特徴の一つだ。
「自律走行モード」とは、自動運転でも使われているセンサーやLiDARなどを用いて、周囲を認識して障害物を避けたり、場合によってはいったん停止したりしながら目的地に向かって自律的に走行するモードのこと。
一方、「軌道走行モード」は、床面に軌道線を引き、その軌道上を走らせるモードだ。これまでも製造工場などで磁気テープ誘導による無人搬送車(AGV:Automatic Guided Vehicle)は長らく使われてきたが、LexxPlussは20年近く技術革新がなかったAGVを高度化させた「次世代AGV」を開発した。磁気テープではなく、コードを印刷したテープを軌道線とし、特殊なカメラを使ってさまざまな情報をテープから読み取る。それを、独自に開発したシナリオベース制御システムと掛け合わせることによって、ロボットに30種類以上の多様な動きを与えることができる。
 軌道走行モードで使用する軌道線には独自のドットコードがプリントされている。
軌道走行モードで使用する軌道線には独自のドットコードがプリントされている。
「この2つのモードを、倉庫をはじめとする物流現場のやりたいことに応じてパズルのように組み合わせて使える点が、ロボットを制御するソフトウェア面の特徴です。これによって、現場の作業工程やレイアウトを変えずとも、人や設備とロボットが精緻に連携できます」
技術に優劣はなく、問題を解決できる技術を採用する
現在では、物流システム/マテハン(マテリアルハンドリング)機器メーカーのみならず、自動運転技術を持つ総合電機メーカーなども自律走行を主軸とした自動搬送ロボットの世界に参入してきている。そのような流れの中で、LexxPlussが枯れた技術ともいえる軌道走行とのハイブリッドにしたのはなぜか。
「自律走行は、例えば人を見たら自律的に迂回(うかい)する技術です。周りの環境が変わると、それに合わせてロボットの挙動も少しずつ変わり、位置がずれてくるんですね。でも、実際の物流現場のロボットに対する要求水準はすごくタイトです。例えば、搬送する棚を『だいたいこの辺に置いて』ではなく、『作業員の真横◯cmの位置にこういう向きで置いてくれ』というレベルで指定されます。そして、100回やったら100回同じ場所に止めなければなりません」
作業員が棚から物を取って梱包作業をする際に、一歩踏み出して物を取るか、その場で動かず物を取れるかの違いは、作業効率に影響する。1回ごとには大して差がないように見えても、小さなロスが積もり積もって、例えば出庫時間が予定を大きく過ぎてしまうことにもなりかねない。
「そのような精緻な搬送は、人間に任せるほうが簡単なんです。でも、ロボットの自律走行でやろうとすると、繰り返しで精度を求められるものは意外に難しくてやりにくい」
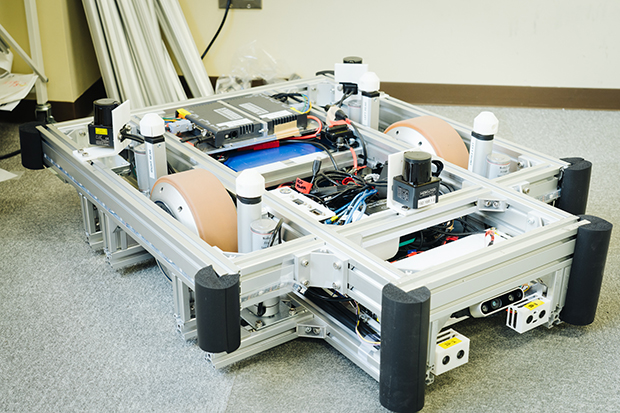 自動搬送ロボットのハードウェア「LexxHard」の試作モデル「V3」。この上に棚や台車を載せて走行する。複数のカメラ、センサー、LiDARなどを搭載し配線が込み入っている。
自動搬送ロボットのハードウェア「LexxHard」の試作モデル「V3」。この上に棚や台車を載せて走行する。複数のカメラ、センサー、LiDARなどを搭載し配線が込み入っている。
では、軌道走行モードで同じ動作をさせればよいかというと、そうはいかない事情がある。物流倉庫では、例えばセールの時期は大きく作業量が増え、ロボットに求められる動きが変わる。倉庫によっては朝と夜で使い方が違うこともあり、同じ磁気テープをずっと引いておくことは考えにくいのだ。
そうした現場の細かいニーズに対応するためには、棚を作業員に横付けするときや狭い通路を通る際には軌道走行に、作業場所と作業場所の間の長い距離を行き来するときは自律走行に切り替える「ハイブリッド型」が現時点での最適解だという判断に至った。
「自律走行と軌道走行、2つの技術の間に優劣はなく、単に技術の種類が違うだけ。両者の“いいとこ取り”をして、それぞれの技術の得意な部分を使い分けるのがよさそうだと考えた結果が、ハイブリッド型でした」
当初の起業アイデアは「高層マンション向け自動搬送ロボット」
1990年生まれの阿蘓氏は、名古屋大学機械航空工学科を卒業後、英マンチェスター大学に進学する。そこで機械工学デザインを学び最高位で修了した後、2015年に日本に戻りボッシュへ入社した。2年間に及ぶ同社独自の若手リーダー育成プログラムを通じて、自動運転開発に携わった。その後、社内の新規事業である自動バレーパーキング(AVP:Automated Valet Parking)システムの日本開発チーム立ち上げに技術リーダーとして参画した。
バレーパーキングとは、ホテルなどでクルマを駐車する際に、運転手に代わってホテルの係員が駐車作業を行うサービスのこと。これを、係員ではなくクルマ自身が行うシステムがAVPだ。AVPは同じ自動運転でも公道を走らせるのと違って、クルマを動かす空間が限定的なのが特徴だ。この経験が、後の起業時に「何をつくるか」を考える際に影響を与えることになる。
「潜在的には、いつか自分で何かやりたいと思っていました」と話す阿蘓氏は、過去にもアプリの起業アイデアを持って投資家のもとを回ったり、Deep4Driveというモビリティサービス開発有志団体を設立したりもした。そんな中、今回LexxPluss起業の最初のきっかけとなったのは、ボッシュ在籍時にチームで雑談中にふと生まれた「高層マンション向けの自動搬送ロボット」のアイデアだった。
「高層マンションの構内は広い。荷物を持ってエントランスと部屋を行き来するのは大変だから、搬送を自動化したらいいんじゃないか」。そう考えた阿蘓氏は2019年秋頃から本格的に動き出し、利用者として想定する高層マンション居住者へのヒアリングと、ロボットのプロトタイプ制作に取り組み始めた。
 コロナ禍の今も毎週のように顧客と対話し、常に現場の問題と向き合ってプロダクト開発に生かす。
コロナ禍の今も毎週のように顧客と対話し、常に現場の問題と向き合ってプロダクト開発に生かす。
「自動運転やロボットで難しいのは、ビジネスモデルなんです。開発コストが非常に大きいこれら技術を顧客が導入する理由は、『人手にかけていたコストが大きく削減できる』か、そうでなければ『付加価値がとてつもなく大きい』しかありません。高層マンション向けの搬送ロボットは後者の位置付けで『行ける』と当初は思っていたのですが、ヒアリングを重ねる中で『あれば助かるけれど、費用を払うほどではない』というのが大方の意見だと分かりました」
ビジネスとして成立しづらいと判断した阿蘓氏は、高層マンション向けロボットを断念。すぐさま、現在の物流倉庫向けの自動搬送ロボットにピボットした。2020年3月の会社設立直前のことだった。
「メーカーの工場から物が出荷されて倉庫に行き、届け先まで運ばれる。この物流の一連の流れのどのプロセスにも、自動化のニーズはあります。ただ、宅配業者が担っているラストワンマイルの部分は公道がフィールドですから、技術的に必要な要素も多く難易度が高い。でも、物流倉庫であれば空間が限定されていますし、前職の自動バレーパーキングシステムに携わった経験から、技術的に何が必要で何が不要かは感覚的に分かっていました。自分たちが持つ技術と、自動化のニーズが合致したところが倉庫の搬送自動化だったというわけです」
ロボットへの対価でなく倉庫の業務効率化という「成果」に課金
LexxPlussでは、自動搬送ロボットを作って販売して終わりという、従来型の製造業のビジネスモデルは想定していない。
「具体的なビジネスモデルは、まだ検討しているところです。最終的に目指しているのは、僕らのロボットが広く使われることはもちろんですが、使われたことによってお客さまの倉庫での業務が効率化されることです。最終的な成果から対価をいただくモデルにしたい。その可能性の一つとして、Robot as a Service(RaaS)というサブスクリプションモデルを考えています」
企業が実際にロボットを導入するまでには、検討、導入、運用の3つのフェーズを経ることになる。LexxPlussは、その3つを合わせて総合的に付加価値を提供できるようなビジネスモデルの設計を試みている。ただ、現時点ではプロダクトが開発中ということもあり、先行して検討フェーズの企業向けに「自動搬送ロボットの導入分析サービス」を有償で提供しているところだ。
プロダクトがリリースされた後は、導入フェーズの企業のニーズに応じて、「販売してほしい」という企業には販売モデルで対応し、導入後の運用も必要としている企業にはRaaSで対応する、そんな未来が阿蘓氏には見えている。
「理想としては、検討と導入フェーズのサービスは無料で提供したいと考えています。お客さまはロボットが欲しいわけじゃなくて、ロボットを使って業務効率化と安定的な運営をしたいのですから。そこまで行き着いた段階で対価をいただくモデルに、できればしていきたいと考えています」
持てる技術よりも、まず問題に向き合う
目下LexxPlussのメンバーが注力しているのは、ハードウェアである自動搬送ロボット「LexxHard」の量産モデルとなる「V4」の開発だ。試作機の位置付けだったV3をベースに、サイズを60×60cmに収め、筐体デザインも施して市場に投入できる形にバージョンアップする。小型ながら、積載重量は300kg、牽引なら500kgまで運べるLexxHardのパワフルさは「グローバルのニーズにも十分応えうる」と阿蘓氏は確信する。
 LexxHard V4のデザインスケッチ。
LexxHard V4のデザインスケッチ。
また、LexxHardの動きを司るソフトウェア「LexxAuto」については、基本技術はすでにあり、現在は物流現場に合わせたクオリティー向上に勤しむ日々だ。
「僕らが目指しているのは、軌道走行で止まったときの誤差を99%以上、±1cmに収める精度です。現状では、同じ作業をすれば必ず目指した位置に止められますが、いろいろな動作シナリオと組み合わせた場合にも精度を保ち、人との作業連携に問題が起きないようにするのが目標。あとは、モードの切り替え速度を早めるなどの細かいチューンアップをしながら、ソフトウェアの品質を磨き続けています」
LexxPlussは、コーポレートビジョンに「Sustainable Industry, Sustainable Life (持続可能な産業と持続可能な生活を)」と掲げてスタートした。「自分はエンジニア出身なので技術起点で考えがち」と話す阿蘓氏は、このビジョンに込めた意図をこう語った。
「解決すべき問題をおろそかにしてしまって、技術ドリブンでプロダクトを作ってみたら全然売れなかった──そういう話は技術会社の“あるある”ですよね。だから僕らは、まず問題に向き合う、その解決のために技術を使う会社でありたいと思いました。今はロボットが問題のソリューションとして正しいと思ってやっていますが、10年後は違うかもしれない。その時は、何か全く別のプロダクトをつくっていてもいい。自分たちの生活の基盤となっている産業を支える、このビジョンは普遍的なターゲットであり、熱意を持って取り組んでいけると思っています」