
マイコンボードがタイムをサポート
micro:bitでクラシックカーレース優勝を目指してみた!

2019年11月23日。勤労感謝のこの日、総勢108台にもおよぶピカピカの車が東京・汐留のイタリア街に登場した。いずれも1930年代から1970年代に製造された、「クラシックカー」と呼ばれる旧車たち。いまから周辺の公道を使って、クラシックカーレース「12a Coppa di Tokyo 2019」が開催される。1人のエンジニアが愛車にmicro:bitを搭載してこのレースに挑んだ。アナログとデジタルの究極のコラボは実を結ぶのか?
コラボはなぜ生まれたのか?
小美濃芳喜氏は、かつて学研(現・学研プラス)で、「大人の科学」や科学教材などを作ってきたエンジニアだ。最近では「メイカーとスタートアップのための量産入門」(オライリージャパン刊)を上梓した、量産システムのプロでもある。15年前に日本で行われた「La Festa Mille Miglia 2004」に参加したのがきっかけで、クラシックカーレースにハマった。いまや1960年製の愛車「メッサーシュミットKR200」を駆って年に1度はレースに挑む。
クラシックカーは、ぜいたくな大人の趣味として知られる。何十年も前の車を磨き上げ、エンジンなど機械部品をメンテナンスし、車検を通して車として走れるようにする。もちろん昔の部品などはほとんど手に入らないので、愛車用に部品から作り直さねばならないこともよくある。こういった作業は、たいてい外部の専門業者に委託する。メカニックに相当の知識と技術がないと愛車は動いてくれないからだ。整備に何百万、何千万とかける愛好家もめずらしくない。
小美濃氏はメカニックも可能な限り自分で手がける。エンジンを整備し、古くなった部品を交換し、自らの手で愛車をレストアしていくことも、趣味の一つと考えている。メカニックを自ら手がけるからこそ、micro:bitと愛車のコラボでチャレンジ、という発想が生まれた。micro:bitは同氏が顧問をしている会社スイッチエデュケーションの主力商品なので、日頃から慣れ親しんでいる。往年のアナログ技術の集積であるクラシックカーと、はやりの教育用マイコンボードという一見とミスマッチに思える両者の組み合わせは、同氏にとっては自然なものだった。
 レースに向けて作戦を練る小美濃芳喜氏。
レースに向けて作戦を練る小美濃芳喜氏。
 自宅に置いてある愛車メッサーシュミットKR200。
自宅に置いてある愛車メッサーシュミットKR200。
 レースに向けて見栄えも大事。仕上げの塗装は自分で行う。
レースに向けて見栄えも大事。仕上げの塗装は自分で行う。
優勝の決め手はタイム管理
レース名の12a Coppa di Tokyo 2019は「2019年第12回東京杯」という意味。毎年東京で行われる有名なクラシックカーレースのひとつだ。競技のポイントはスピードではない。決められたコースに設置されたある一定区間を、決められた時間で駆け抜ける、その正確さを競う。区間の最初にはスタートラインがあり、そこを踏むと計測が始まる。距離にして30mほど走るとゴールラインがあり。通過すると計測終了。設定された時間に近いほど獲得するポイントが高くなる。計測区間は全部で5箇所あり、5カ所で獲得した総合ポイントが高いチームが優勝となる。車にはドライバーとナビゲーター役のコ・ドラ(「コ・ドライバー」の略。助手席に乗る)の2人が乗る。
ポイントは区間走行中のスピードの制御。レースではスタートラインを踏んだ瞬間にストップウオッチで残り時間を計測していくが、残りの距離を念頭に置いてスピードを制御するのは、簡単ではない。ゴールラインを踏む時間が分かっていても、どんな速さで走ればいいのかは、「勘」を働かせるしかない。クラシックカーにも速度計は付いているし、一部のスポーツカーにはエンジン回転計さえある。それでも古い分、その精度は高いとはいえない。
区間には、連続している箇所もある。つまりひとつの区間が終わると同時につぎの区間が始まる。したがって、最初の区間をゴールしたときのスピードが、次の区間のスタートのスピードとなる。2番目の区間内では、加速、減速が必要となり、タイム管理はより厳しくなる。
そこでmicro:bitの出番となる。
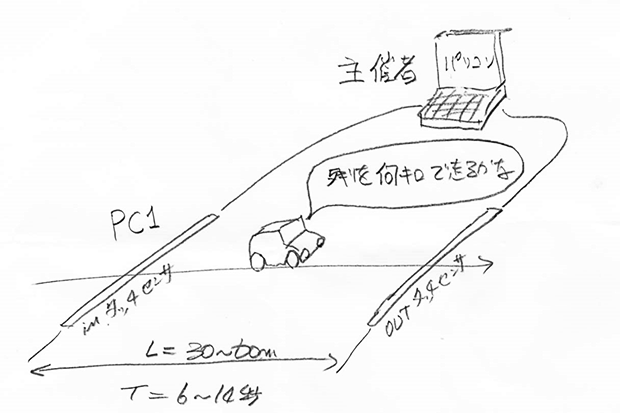 チェックポイントでの主催者の計測方法の模式図。INとOUTの地点にセンサーを設置。チェックポイントに入ったときに計測が始まり、出るときに終了。距離と時間から平均速度が出る。ポイントごとにあらかじめ設定された平均速度に近い値を出すほど上位にランクされる。
チェックポイントでの主催者の計測方法の模式図。INとOUTの地点にセンサーを設置。チェックポイントに入ったときに計測が始まり、出るときに終了。距離と時間から平均速度が出る。ポイントごとにあらかじめ設定された平均速度に近い値を出すほど上位にランクされる。
距離÷時間=速度
区間内の距離を決められた時間で走るためには、最適速度(理想的な平均速度)で等速運動させれば問題ない。ただ、連続した区間では、最初の区間でのゴールラインのスピードと設定した次の区間のスタートラインのそれは異なる。ゴールした、あるいはスタートした瞬間から、加速または減速して最適速度を割り出しながら進まなくてはならない。
ゴールまでの「最適速度」をmicro:bitに計算させる。計算式は単純だ。「ゴールまでの距離÷残りの指定時間=最適速度」。これを刻々とmicro:bitのLED画面に表示させ、その値を読みながらアクセルワークを行う。距離はタイヤの径が決まっていれば回転数から割り出せる。残りの指定時間はタイマーがあれば分かる。
それではタイヤの回転数をどうやってmicro:bitに読み込ませるのか。下の図を見てほしい。タイヤの軸に付けられたスピードセンサーのネオジム磁石が回転すると、リードスイッチが作動し、信号をmicro:bitに送る仕組みだ。micro:bit側ではスタートラインのマークを踏んだところでAボタンを押して、最適速度の計測を始めるようにプログラミング。距離と指定時間を変えたプログラミング済みのmicro:bitを区間の数だけ用意しておいて、スタートラインを踏むごとにAボタンを押す作戦だ。プログラムの作成には、スイッチエデュケーションの協力を得た。
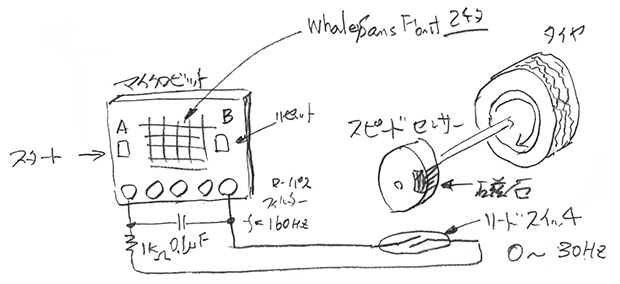 micro:bitとタイヤの接続を説明する模式図。
micro:bitとタイヤの接続を説明する模式図。
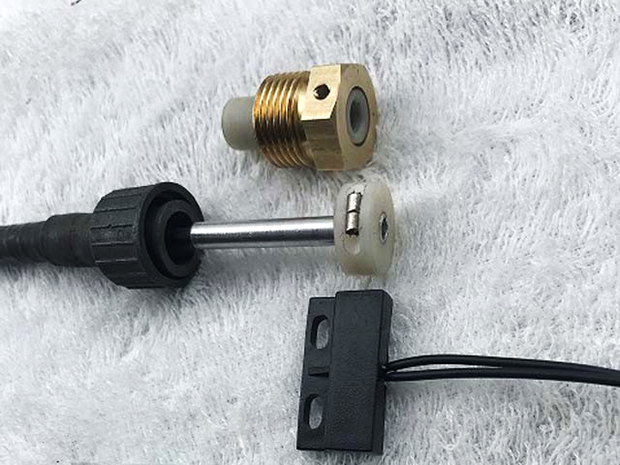 上から、スピードセンサーとタイヤの軸をつなぐ手作りのセンサーユニット、ネオジム磁石がついたスピードセンサー、リードスイッチ。
上から、スピードセンサーとタイヤの軸をつなぐ手作りのセンサーユニット、ネオジム磁石がついたスピードセンサー、リードスイッチ。
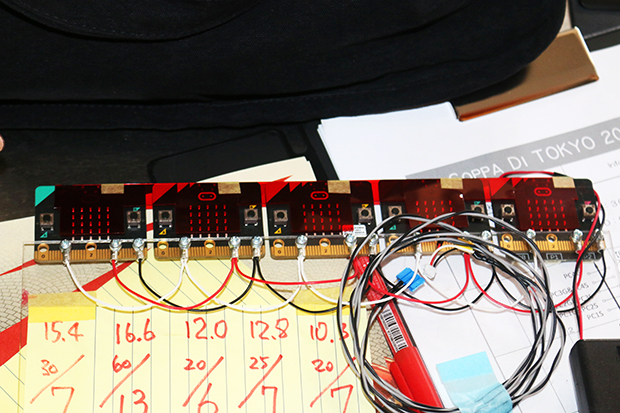 予測されるチェックポイントの数に合わせて、5台のmicro:bitを用意したが……。
予測されるチェックポイントの数に合わせて、5台のmicro:bitを用意したが……。
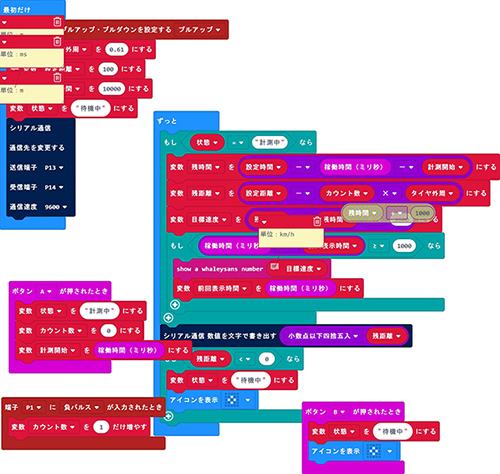 micro:bitに入力したプログラムの一部。
micro:bitに入力したプログラムの一部。
アジャストに苦労する
小美濃氏は、愛車にメカを組み込み、練習走行可能なコースで試走してみた。まずは路面に20m間隔で、3本のラインを引く。1区間目のスタート、1区間目のゴール(=2区間目のスタート)、2区間目のゴールのマークとなる。指定時間は1区間目を7秒、2区間目を10秒に設定。2区間目のゴールとなるラインを踏んだ時にジャスト10秒であれば、試走は成功となる。早速1本目のトライ。
小美濃氏は語る。
「micro:bitの表示に従って加速してみましたが、10秒をはるかにオーバーしてしまいました。どうやら、“最適”なはずの速度が、遅いようでした。タイヤからmicro:bitに送られる信号にノイズが載っている、リードスイッチの開閉時にチャタリング※が発生して、それを拾っている、などが考えられました。急きょ、50Hzのローパスフィルターを作って回路に挿入しました。なんとかうまくいって、安定した結果が出るようになりました」
どうにか、問題をクリアして大会当日を迎えた。
※チャタリング——スイッチなどで、1回だけ押したのに数回押したような結果となってしまうなど、不安定な動作となること。
最新データを入力して、準備万端
あいにくの降りしきる雨の中、9時に汐留イタリア街西公園に集まったクラシックカーは108台。往年の名車の中に小美濃氏のメッサーシュミットKR200もあった。会場前のビルで雨宿りをする氏を見つけた。今日のパートナー、コ・ドラの石田定治氏と綿密な打ち合わせ中だ。今日のコースとチェックポイントを示す資料に数字を書きこんでいく。
「チェックポイントが発表されたので、距離と目標タイムから平均時速を割り出していたところです。用意した5つのmicro:bitにデータを打ちこめば、準備は万端なんですが……」
ここで問題が起きる。チェックポイントは主催者から当日スタート前に発表されるのだが、5カ所と予想し、micro:bitを5つ用意した。ところが、発表は6カ所。焦りつつ、各チェックポイントの平均速度を計算すると、第4チェックポイントと第6チェックポイントは同じだった。これなら同じmicro:bitを使えば良い。ホッと胸をなでおろす小美濃氏。
 汐留イタリア街西公園を埋めつくしたクラシックカー。
汐留イタリア街西公園を埋めつくしたクラシックカー。
 当日発表されたチェッックポイントのデータに合わせ、micro:bitのプログラムを修正。
当日発表されたチェッックポイントのデータに合わせ、micro:bitのプログラムを修正。
降りしきる雨の中、レーススタート
10時20分。ゼッケン1番の車がスタート。後続車が数十秒ごとに次々と会場を後にする。小美濃氏のメッサーシュミットはゼッケン92番だが、たちまち順番がやってきた。最初のチェックポイントはスタートからわずか200メートルほどのところ。広かったり、狭かったり、さまざまな間隔で5本の黄色いテープが張られていた。5本テープだと4連続計測になる。最初から最難関の設定のようだ。
テープの端々には計測機器を操作する大会スタッフが2人。各車は最初の計測スタートのテープの前でスピードを極端に落とすか、いったん停車する。スタートのテープからゴールのテープまでは、各車各様に進む。同じスピードで進む車があれば、加速、減速を細かく繰り返す車もある。小美濃氏のメッサーシュミットがやってきた。ポイント侵入後、同じペースで車は進む。おそらく車内では、速度を示すmicro:bitの数値を読み上げるコ・ドラの石田氏の声が響いているはずだ。ゴールを過ぎると次のチェックポイントに向けて走り去っていった。
 第1チェックポイントの計測スタートラインに侵入する小美濃氏のメッサーシュミット。
第1チェックポイントの計測スタートラインに侵入する小美濃氏のメッサーシュミット。
 小美濃氏は、micro:bitの値を見ているコ・ドラの石田氏の指示でスピードを調整する。
小美濃氏は、micro:bitの値を見ているコ・ドラの石田氏の指示でスピードを調整する。
 第1チェックポイントの計測ゴールラインを無事通過。どんな数値が出たのだろうか?
第1チェックポイントの計測ゴールラインを無事通過。どんな数値が出たのだろうか?
無事完走。果たして結果は?
汐留を出た後は、上野公園を周り、両国、お台場を通って再び汐留へと戻ってくるコース。ただし、公道の上、チェックポイントでは前の車のポイント通過を待ちつつ、各車慎重に走るので渋滞もしばしば起きる。総走行距離は30.22kmだが、競技時間としては90分ほどかかる。
12時近くになって、最初にスタートした車が戻ってきた。車が走り去ってがら空きだった汐留イタリア街西公園がたちまち埋まっていく。ゼッケン順ではなく、数字は激しく入れ替わっている。いよいよ空きスペースに余裕がなくなってきた頃、赤いメッサーシュミットの姿が見えた。無事にゴール。急いで車体に駆け寄る。フードを開け、コックピットからドライバーの小美濃氏が出てきた。
「micro:bitの指示通り走ったつもりだけど、さてどうかなあ? 雨がフードの隙間から入って足元は濡れるし、フロントは曇るしで走りづらかった」
開口一番、語る小美濃氏。
「micro:bitの動作は完璧でしたよ。練習走行時に起きたような問題はまったくありませんでした」
コ・ドラの石田氏もある程度手応えを感じているようだ。
昼食を挟んで14時過ぎから主催者による結果発表。各クラス(車のタイプによって6つのクラスに分けられている)の優勝者と特別賞の受賞者が読み上げられる。小美濃氏と石田氏のチームは「ミニマムなカーで頑張ったね賞」を受賞。
「micro:bitは一定の役割を果たしてくれたと思います。今回、単純に『最適速度』を「残り距離÷残り時間」で計算させましたが、ゴール直前になると、少ない誤差でも大きな『速度差』として表示してしまう課題がありました。今後は、もう少しユーザーフレンドリーなプログラムを開発して、レースに臨みたいですね」
micro:bitとクラシックカーによる、小美濃氏のレースへの挑戦は、まだまだ続くようだ。
 続々とゴール地点へと向かうクラシックカー。
続々とゴール地点へと向かうクラシックカー。
 小美濃氏のメッサーシュミットも戻ってきた。
小美濃氏のメッサーシュミットも戻ってきた。
 無事ゴールして、コックピットを開けるドライバーの小美濃氏とコ・ドラの石田氏。
無事ゴールして、コックピットを開けるドライバーの小美濃氏とコ・ドラの石田氏。
 レースを終え、「ぜひまたmicro:bitを使って挑戦したい」と語る小美濃氏。
レースを終え、「ぜひまたmicro:bitを使って挑戦したい」と語る小美濃氏。