
【新発見】家電に手を付けるだけでロボットに見える

普段何気なく使っている家電にロボットのような手を付けてみました。すると不思議なことに、家電がまるでかわいらしいロボットに見えてくるではありませんか。家電とロボットの違いは一体何なのか? 製作と検証の過程を紹介します。
近頃は街中でよくロボットを見かけるようになってきました。レストランの配膳ロボットや、空港の案内ロボットは有名です。しかし、そもそもロボットとは一体何なのでしょう?
「ロボット」という言葉は、チェコ語で労働を意味する「robota」に語源があると言われています。つまりロボットとは、労働のためのツールとして生まれ、人の生活をサポートしてくれるものです。
そう考えると、冷蔵庫や洗濯機といった家電だって、人の生活をサポートしてくれる優秀なロボットといえるのではないでしょうか? しかしそれらはロボットとは呼ばれていません。
ロボットの特徴
ロボットといえば、何となく人型をイメージしがちです。映画やアニメの影響が大きいのかもしれません。中でも、ロボットの印象が強いのはアーム部分ではないか、と思いました。
現実に存在するロボットアームは、精密な動きができるように複雑な形状をしていますが、昔ながらの空想上のロボットといえば、C型のハンドをしたジャバラのようなアームを想像します。「ロボットのイラストを描いて」と言われれば、多くの人はこのようなイメージで描くのではないでしょうか。
 C型のハンドのイメージが強いです。
C型のハンドのイメージが強いです。
ということは、もし家電にジャバラのようなロボットアームが 付いたなら、我々は自然とそれをロボットと呼んでしまうのではないでしょうか?
回っているぜんまいが横に付いていれば、なんでも「ぜんまい仕掛け」で動いているように見えるのではないかという「なんでもぜんまい」が良いお手本です。これに倣って、ロボットアームが横に付いてさえいれば、なんでも「ロボット」に見えるのか、アームを自作して検証してみることにしました。
 家電にロボットアームをくっつけます。
家電にロボットアームをくっつけます。
なんでもロボットに見せちゃうアーム
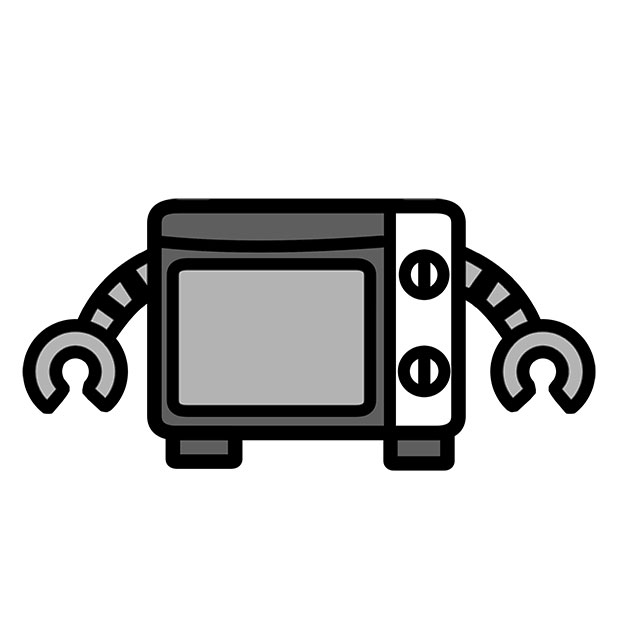
制作した完成品がこちらです。自作のロボットアームを電子レンジにくっつけてみました。
 なんだか、かわいらしい見た目になりました。
なんだか、かわいらしい見た目になりました。
家電には磁石で簡単にくっつきます。定期的にアームが動くことで、「自分はロボットだぞ」感をアピールします。
 磁石がくっつくものならなんでもOKです。
磁石がくっつくものならなんでもOKです。
いろいろな物に付けてみる
それではいろいろな家電にアームを付けて、ロボットっぽくなるか試してみましょう。
冷蔵庫に付けてみました。扉を開け閉めするとブルブルふるえてかわいらしいです。でもかわいいからといって開け閉めを繰り返すと、電気代が高くなっちゃいそうですね。
 思わず手をつかみたくなります。
思わず手をつかみたくなります。
炊飯器に付けてみました。電子レンジや冷蔵庫だとロボットアームが小さく感じられましたが、炊飯器だとちょうどよいサイズ感です。ついご飯をおかわりしたくなります。
 しゃもじを持たせてみたいですね。
しゃもじを持たせてみたいですね。
家電ではありませんが、ゴミ箱にも付けてみました。これもなかなかよいサイズ感で似合っています。また、フタを開け閉めすることで、まるで口をパクパクさせてるようなかわいらしさがあります。
 ゴミをたくさん入れたくなります。
ゴミをたくさん入れたくなります。
それでは作り方を紹介します。
準備するもの
なんでもロボットアームの製作部品は以下の通りです。部品は使用個数換算で合計2422円(税込)。3Dプリンター造形品は500gで3000円のフィラメントとして金額を換算しています。

- 3Dプリンター造形品:ベース ×1個(165円相当)
- 3Dプリンター造形品:カバー ×1個(128円相当)
- 3Dプリンター造形品:アーム ×4個(145円相当)
- 3Dプリンター造形品:ハンド ×1個(210円相当)
- FEETECHサーボ FS90 ×1個(450円)
- 電池ボックス 単4×3本 リード線 ×1個(60円)
- 単4形アルカリ乾電池 ×1パック(110円)
- ネオジム磁石 角型
- 圧縮バネ ×4個(381円)※購入は(1272円/10個)
- コード ×1パック(330円)
- スズメッキ線 ×1個(6円相当使用)※購入は(300円/10m)
- はんだ ×1個(42円相当使用)※購入は(420円/0.8m)
- ユニバーサル基板 ×1個(25円)
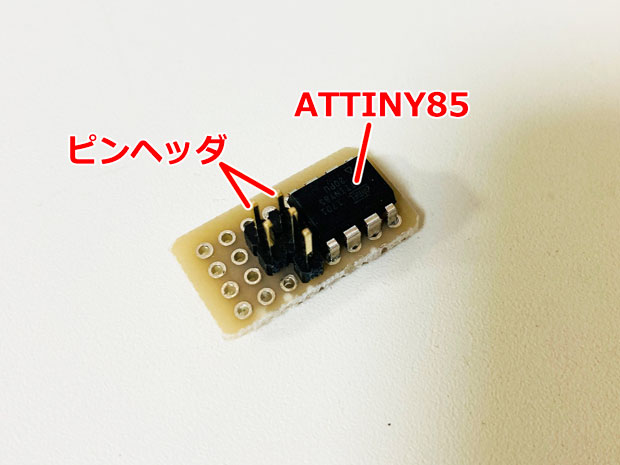
- ATTINY85 ×1個(200円)
- ピンヘッダ1×2 ×1個(25円)
- ピンヘッダ1×3 ×1個(30円)
- ピンソケット1×2 ×1個(15円)
- タッピングビス ×6個 ※サーボ付属品
プログラムの書き込みには以下の部品が必要です。合計 3950円(税込)。
- Arduino Uno ×1個(3630円)
- ブレッドボード ×1個(130円)
- ジャンパーワイヤー ×1セット(180円)
- 電解コンデンサー ×1個(10円)
プログラムを書き込む
マイコンはATTINY85という小型チップを使用しています。ロボットアームはサーボを1軸動かすというシンプルな動きなので、なるべく低コストで機能が少なく、省スペース化が図れるものを選定しました。
 とても小さなマイコンです。
とても小さなマイコンです。
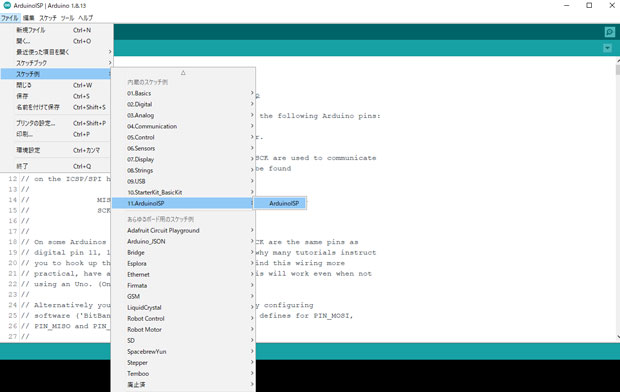
しかし、ATTINY85では一般的なArduinoのように、そのままUSBを接続してプログラムを書き込むことができません。そこで、Arduino Unoを書き込み機として利用します。ArduinoISPというファームウェアがそれを可能にします。Arduino IDEの[ファイル]→[スケッチ例]→[11.ArduinoISP ]→[ArduinoISP]をそのままArduino Unoに書き込みます。
そして、Arduino UnoとATTINY85を以下のように接続します。
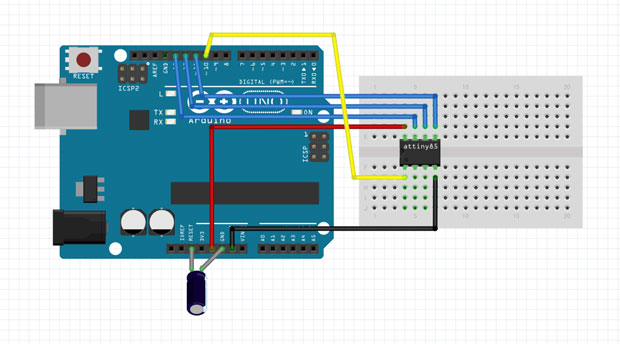 ブレッドボードとジャンパーワイヤー、電解コンデンサーを用意して接続します。
ブレッドボードとジャンパーワイヤー、電解コンデンサーを用意して接続します。
ATTINY85に書き込む、ロボットアームを動かすプログラムは以下の通りです。一定周期でサーボの角度を変える、とてもシンプルなものです。
const uint8_t PIN_SERVO = 0;
void move_servo(uint16_t pos1, uint16_t pos2){
for(int i=0; i<50; i++) {
digitalWrite(0, HIGH);
delayMicroseconds(pos1);
digitalWrite(0, LOW);
delayMicroseconds(pos2);
}
}
void setup() {
pinMode(PIN_SERVO, OUTPUT);
}
void loop() {
move_servo(600, 19400);
delay(1000);
move_servo(2400, 17600);
delay(5000);
}
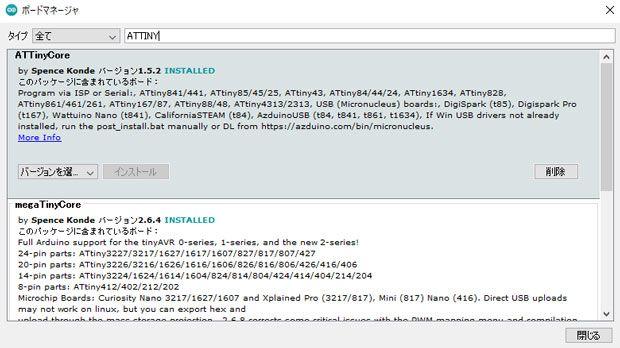
次にATTINY85のボード情報を追加します。Arduino IDEの[ファイル]→[環境設定]の追加のボードマネージャーのURLに"http://drazzy.com/package_drazzy.com_index.json"を追加します。そして、[ツール]→[ボード]→[ボードマネージャー]で「ATTinyCore」をインストールします。
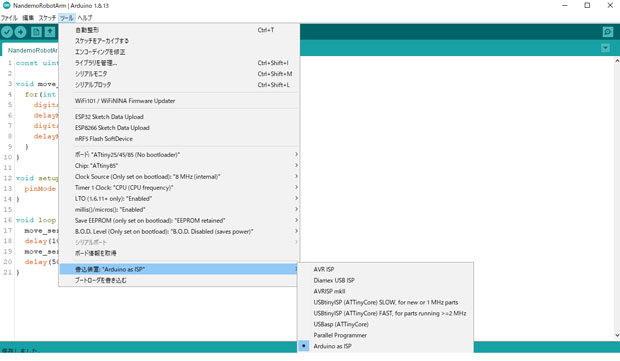
ボード情報が追加できたら設定を読み込み、書き込み装置を"Arduino as ISP"設定にしてブートローダーを書き込みます。そしてスケッチを書き込んだら完了です。
組み立てる
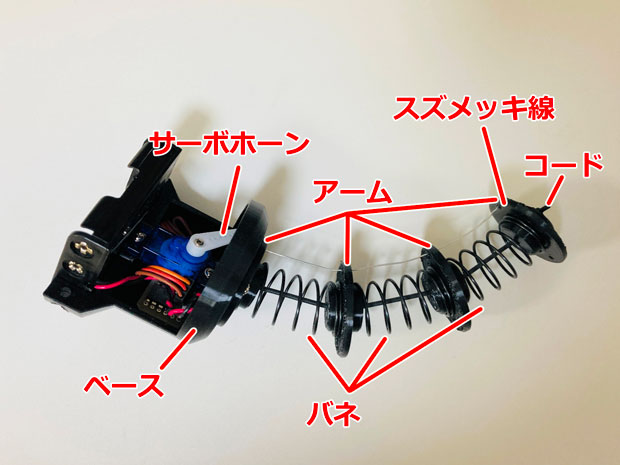
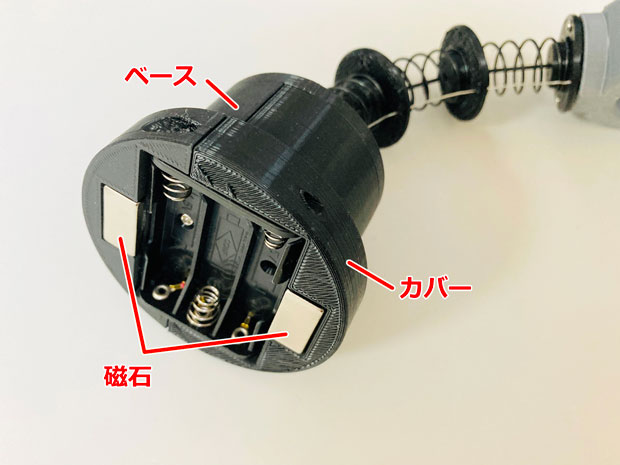
サーボをベースにタッピングビスで固定します。

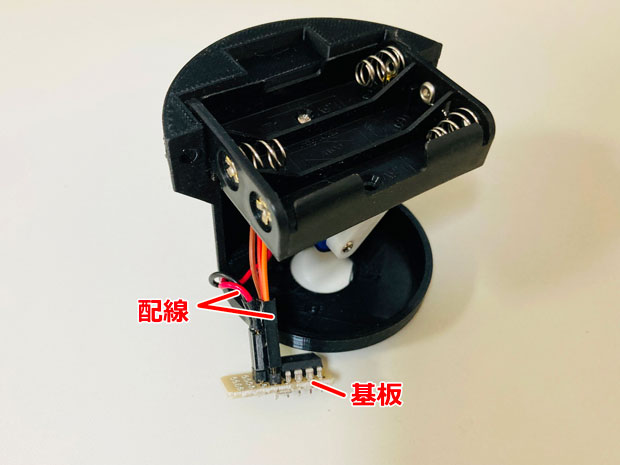
電池ボックスをベースにタッピングビスで固定します。電池ボックスの配線端部にピンソケットをはんだ付けします。

ATTINY85とピンヘッダ(1×2、1×3)をユニバーサル基板にはんだ付けします。基板はカットしコンパクトにしておきます。
電池ボックスとサーボの配線を、それぞれ基板のピンヘッダに接続します。
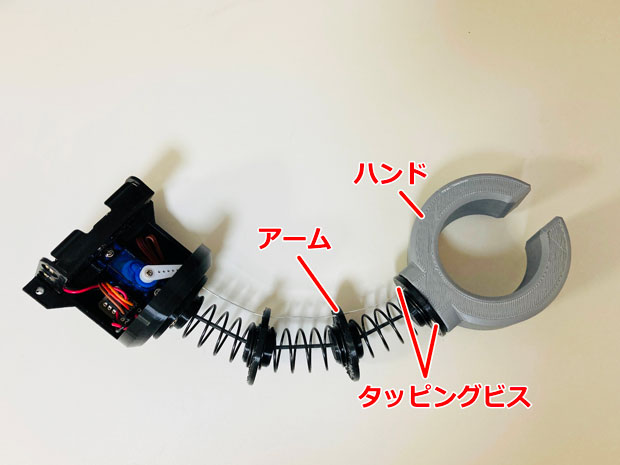
バネを間に挟みながらアームを組み立てます。中心にはコードを通し両端で結びます。端にはスズメッキ線を通してサーボホーンとつなぎます。
ハンドをアームにタッピングビスで固定します。
カバーをベースにはめ込み、磁石を付けて完成です。
電池ボックスに乾電池を入れると動きます。ロボットアームは両腕が欲しいので2つ作りました。

果たしてそれはロボットか!?
ロボットアームが付くだけで、家電や日用品がもはやロボットと呼んでもよい見栄えになりました。どことなく愛着も湧いてきます。ロボットは、生活をサポートしてくれるだけではなく、人々に愛を与えるものでもあるのですね。家電の親しみやすさがぐんとアップしました。
 どの家電も愛らしくなりました。
どの家電も愛らしくなりました。
しかし、ロボットアームが付くことにより、ついその家電に何らかの機能が追加されたかのような期待もしてしまいました。例えば、ロボットアームで炊飯器ならしゃもじを、ゴミ箱ならゴミをつかんでほしい。つまり「ロボットとは、今ある家電よりも高度なレベルで人の生活をサポートしてくれるべきものだ」という思いが、心の奥底にあるのでしょう。
検証の結果、「見た目はとてもロボットっぽくなり親しみやすいが、機能面での期待値が上がってしまう」ということが分かりました。しかし機能面は近い将来、技術が解決してくれることでしょう。見た目だけでなく、近い将来、どの家電も、機能面を含めてロボットと呼べるようになるかもしれません。大切な気付きは、ロボットアームが付くことで愛着心が深まったことです。ロボットは人の生活をサポートするだけでなく、ペットのようなパートナー的要素も持ち合わせているのですね。