スペースビット、月面四足歩行ロボット「ASAGUMO」を日本で初公開
2019/12/06 13:30

スペースビットは、世界初の月面四足歩行ロボット「ASAGUMO」の実用模型を日本で世界初公開する。
実用模型が公開されるのは、2019年12月5日~8日の間、東京と京都で開催される国際ワークショップ「The 3rd International Moon Village Workshop & Symposium」だ。
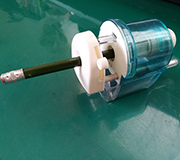
ASAGUMOには超小型人工衛星(キューブサット)が搭載されており、重量は1.3kg。 太陽光を原動力とし、車輪や走行用ベルトは使用せず、クモの脚のような形をした四脚で歩行することが特徴で、従来の探査機ではアクセスできなかった溶岩洞や凹凸のある地形でも探索可能だ。
将来的には、母船となる宇宙船から、大量の探査機を月面に輸送/配置し、収集データを地球へ送信することを計画している。宇宙船は、夜間に探査機を保護する役割も担う。
ASAGUMOはアストロボティック・テクノロジー(米国)が2021年に予定している、ペレグリン月着陸船を利用した最初の月面探索ミッションで、月へと送られる予定だ。
同ミッションでは着陸船から10メートル歩行し、走行空間センサー(3D-LiDAR)やHDカメラなどを含む複数のセンサーを活用しながら、データを収集する。収集されたデータはペレグリン月着陸船を通して、地球の地上管制局へと送信される。